
匠心智造
镌刻每一座里程碑
■ 微创®医疗机器人自主研发的图迈®由复旦大学附属中山医院泌尿外科主任郭剑明教授团队顺利完成腹膜后入路肾部分切除术
■ 图迈®腕式手术器械灵活,能在腹膜后入路的狭窄空间下灵巧操作;3D 立体的手术视野清晰,可以很好地辨识复杂精细的操作
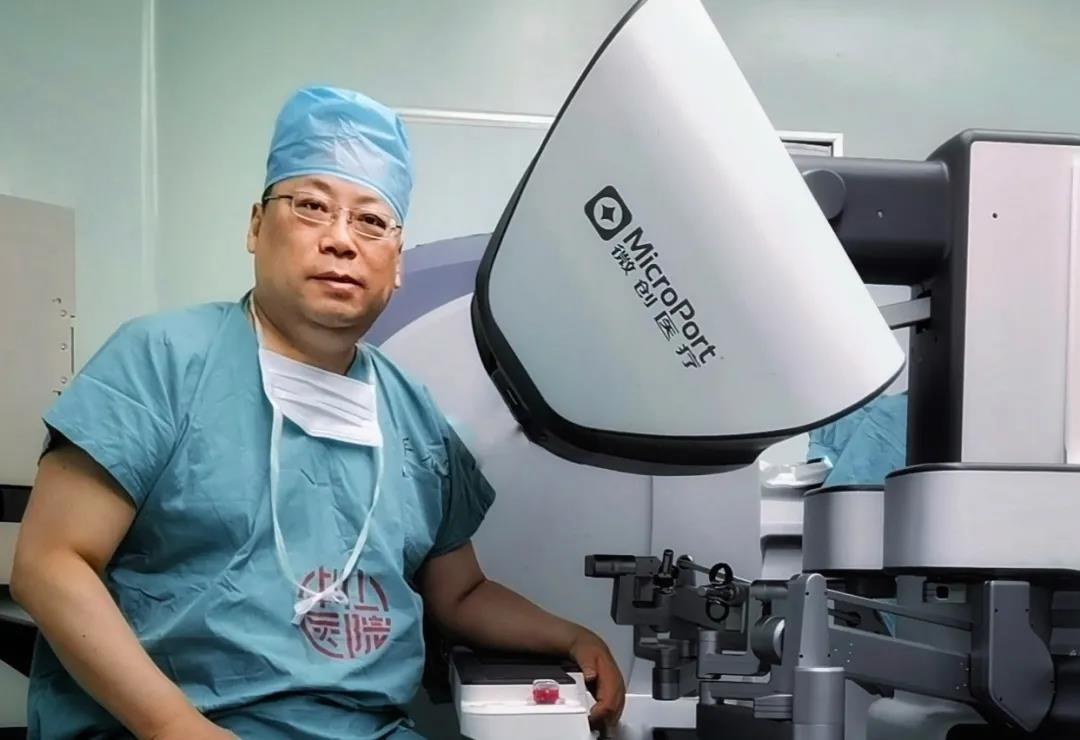
郭剑明教授操作图迈®腔镜手术机器人
中国,上海——2020年12月15日,上海微创医疗器械(集团)有限公司(以下简称“微创®”)旗下微创(上海)医疗机器人有限公司(以下简称“微创®医疗机器人”) 自主研发的图迈®Toumai®腔镜手术机器人系统(以下简称“图迈®”) 由复旦大学附属中山医院泌尿外科主任郭剑明教授团队顺利完成腹膜后入路肾部分切除术。这是图迈®开展的首例腹膜后入路肾部分切除术,也是继完成中国首例前列腺癌根治术、肾部分切除术后,图迈®在高难度复杂泌尿手术领域取得的又一重要临床应用突破。

图迈®腔镜手术机器人手术现场
本例患者为一名37岁女性,一周前体检时发现右肾实性占位,大小4.7*3.7cm。术前诊断为右肾肿瘤,患者慕名求医至复旦大学附属中山医院泌尿外科,郭剑明教授经与手术团队讨论,决定使用图迈®腔镜机器人行腹膜后入路肾部分切除术。手术由郭剑明教授亲自实施,术中为充分保护肾脏功能未进行肾门阻断,主刀医生操作时间20分钟,术中出血不到10mL。

郭剑明教授施行腹膜后入路肾部分切除术后肿瘤标本
郭剑明教授术后评价:“ 图迈®的腕式手术器械很灵活,能够在腹膜后入路的狭窄空间下灵巧操作;3D 立体的手术视野清晰,可以很好地辨识复杂精细的操作。整台肾部分切除术进行得流畅而顺利,验证图迈®可以胜任此类手术。”
机器人腹腔镜肾部分切除术的入路选择主要取决于肿瘤部位、数目、大小及手术医师的经验等。经腹膜后入路手术可以避免腹腔脏器干扰,减少肠黏连、肠梗阻的发生风险。患者损伤更小,恢复更快,达到更微创伤、快速康复的目的,同时避免了腹腔种植转移,更符合泌尿外科手术无瘤原则,对于肾脏背侧、外侧和上极的肿瘤及有腹腔手术史的患者选择经腹膜后入路更具优势。由于经腹膜后手术靠近体表,且操作空间极为狭小,对手术器械灵活度、机械臂术中避障性能、工作空间、以及术者手术经验与技巧都有着更高的要求。
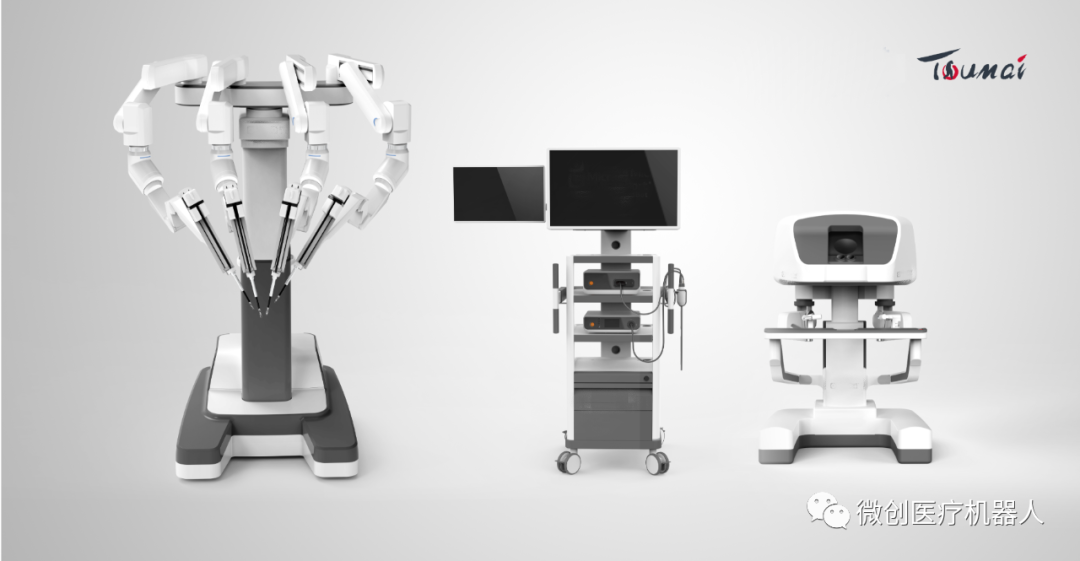
图迈®腔镜手术机器人产品示意图
微创®医疗机器人总裁何超博士表示:“首例腹膜后入路肾部分切除手术的顺利完成,标志着图迈™机器人临床应用进入又一新的里程碑。近期,我国泌尿外科权威专家们使用了图迈®机器人技术,不断突破国产机器人的临床应用难度,扩展临床应用范围。微创®医疗机器人将持续探索未知,打造属于中国患者和医生的机器人手术一体化解决方案。”



欢迎扫描关注
微创®机器人
官方微信公众号
@Copyright 1998-2023,Shanghai Microport Medbot(Group)Co.,Ltd. All rights reserved.
网站备案/许可证号:沪ICP备20013662号
 沪公网安备 31011502015178号
沪公网安备 31011502015178号
互联网药品信息服务资格证书编号:(沪)-非经营性-2021-0020

